目录
- 旋转编码器记次
- 旋转编码器介绍
- 旋转编码器硬件电路
- 接线图
- 对MYOLED.c的修改
- 代码实现
- 标准库实现
- Encoder.h
- Encoder.c
- main.c
- HAL库实现
- IDE配置
- 代码实现
- Encoder.h
- Encoder.c
- stm32f1xx_it.c.c
- main.c
- 标准库实现
- 效果展示
旋转编码器记次
利用外部中断实现上述功能,外部中断适合突发的信号,用脉冲过来,stm32立即处理,没有脉冲的适合,stm32就专心做其他事情,红外接收器也用外部中断,但是按键不适合用外部中断,因为外部中断不好处理按键抖动和松手检测的问题
旋转编码器介绍
- 旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
- 类型:机械触点式/霍尔传感器式/光栅式


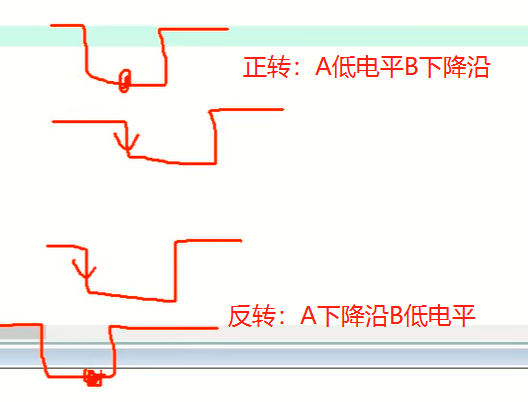
它利用正交波形判定反向,正向旋转,B输出的是滞后90度的信号,反向旋转,B输出的是提前90度的信号,这种输出正交波形的编码器是可以用来测方向的,还有的编码器一个引脚输出方波信号代表转速,另一个输出高低电平代表方向。
旋转编码器硬件电路
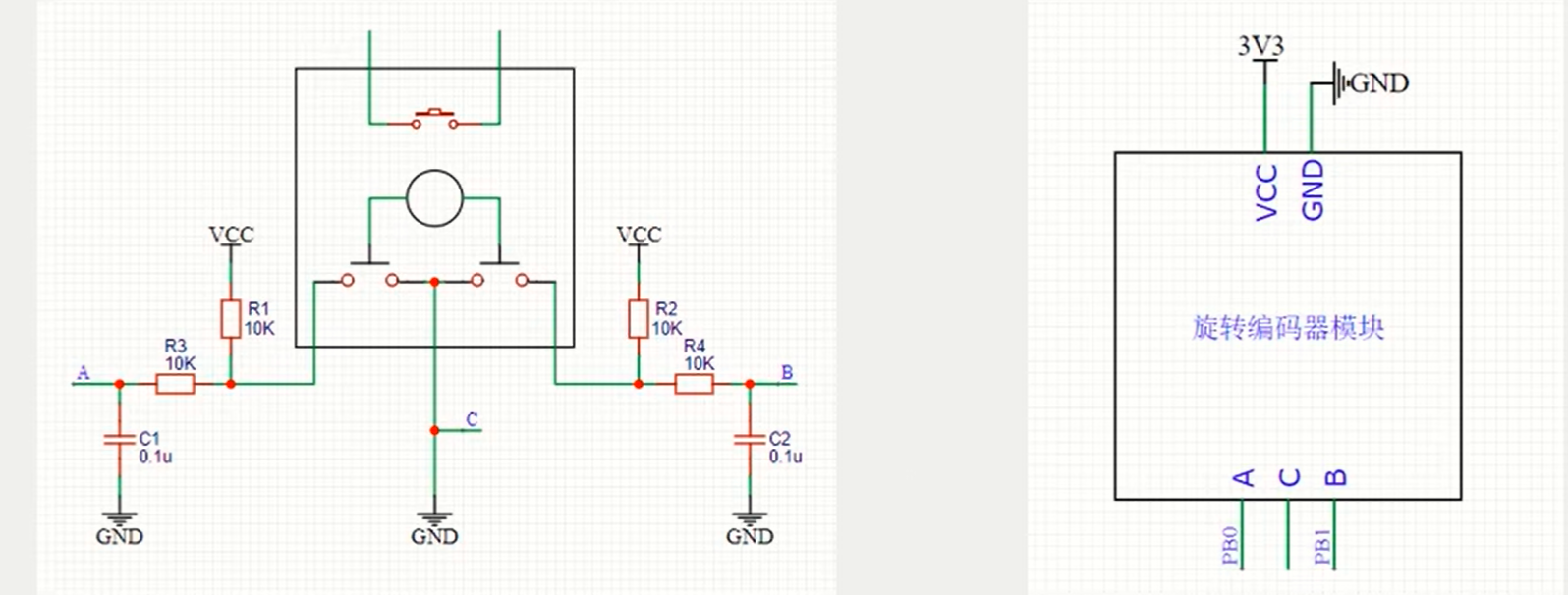
旋转头旋转时,下面的左右两个触电以相位相差90度的方式交替导通,所以设计判定思路就是
接线图

对MYOLED.c的修改
之前的代码在带符号数上显示有问题,现已修正为:
//显示带符号数
void MYOLED_ShowSignedNum(uint8_t x, uint8_t y, int32_t Number, uint8_t Length)
{uint8_t i = 0;uint32_t Number1; //一会取反用的//大于0显示正号,0不显示符号,负数显示负号if (Number > 0){MYOLED_ShowChar(x, y, '+');Number1 = Number;}else if(Number ==0){Number1 = Number;}else{MYOLED_ShowChar(x, y, '-');Number1 = -Number;}//给符号位腾出一个空间if(Number != 0){x++;}//从最高位开始输出,和LCD1602不同的地方在于//这个确定光标位置后,要自己写代码移动光标位置//也就是下面x+ Length - i这个参数,Length - i是指Length和当前要显示数字的位数的差//比如一共显示3位长度,3位10进制,从右往左,第三位是百位,3-3 = 0,这样就能把高位十进制写在最左边//让其按人眼逻辑显示for (i = Length; i > 0; i--) {MYOLED_ShowChar(x + Length - i, y, Number1 / MYOLED_Pow(10, i - 1) % 10 + '0');}//如果是0,则最后一位记得变成空,比如从+001变成 000,实际上是0001//所以要清零MYOLED_ShowChar(x + Length, y ,' ');
}
以后都按此修正,之前代码不做修改了(懒)
代码实现
标准库实现
已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void); //初始化旋转编码器
int16_t Encoder_Get(void); //获取旋钮的转度(正负)#endifEncoder.c
#include "stm32f10x.h" // Device headerint16_t Encoder_Count; //旋转编码器计数变量//初始化旋转编码器
void Encoder_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitSturcture;GPIO_InitSturcture.GPIO_Mode = GPIO_Mode_IPU; //上拉输入,EXTI要求浮空上拉或者下拉GPIO_InitSturcture.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitSturcture.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitSturcture);//配置AFIO,选择中断的外部寄存器和引脚GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);//配置EXTIEXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; //指定配置的中断线EXTI_InitStructure.EXTI_LineCmd = ENABLE; //开启中断EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //选择中断模式,而不是事件模式EXTI_Mode_EventEXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发,移开挡光片的时候触发EXTI_Init(&EXTI_InitStructure);//配置NVIC//配置优先级分组,抢占优先级和响应优先级//只有一个中断的话,分的比较平均一些//2位抢占,2位响应//要确保每个模块分组配置都是同一个,如果不放心可放在主函数中//我就放在这里了NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //选择15-10的合并的通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定中断通道使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //分组2,2位抢占,0-3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //这里是响应优先级,都是2位二进制,都设置为1NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //选择15-10的合并的通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定中断通道使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //分组2,2位抢占,0-3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //PB1响应优先级低一些NVIC_Init(&NVIC_InitStructure);
}//获取计数器
//清零,因为每次读取的是旋钮的旋转度
int16_t Encoder_Get(void)
{int16_t Temp = 0;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}//PB0中断
void EXTI0_IRQHandler(void)
{if(EXTI_GetFlagStatus(EXTI_Line0) == SET){//判断另一个引脚的电平//PB0(A)下降沿(因为中断是下降沿触发),PB1(B)低电平//说明是反转if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Encoder_Count--;}EXTI_ClearITPendingBit(EXTI_Line0);}
}//PB1中断
void EXTI1_IRQHandler(void)
{if(EXTI_GetFlagStatus(EXTI_Line1) == SET){//PB0(A)低电平,PB1(B)下降沿//说明是正转if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){Encoder_Count++;}EXTI_ClearITPendingBit(EXTI_Line1);}
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "MYOLED.h"
#include "Encoder.h"int16_t Num; //计数器int main(void)
{MYOLED_Init();Encoder_Init();MYOLED_ShowString(0,0, "Num:");while(1){//Get函数返回的是调用这个函数间隔里//旋转编码器产生的脉冲数Num += Encoder_Get();MYOLED_ShowSignedNum(4, 0 , Num, 5);//如果既在主程序里调用OLED//又在中断里调用OLED//OLED就会显示错误//主程序里OLED刚显示一半就中断了//终端里还是OLED显示,OLED就会挪到其他地方显示//回来的时候,继续显示的内容就会跟着跑到其他地方//所以要设置变量和标志位//当中断返回时,再对这个变量进行显示和操作//这样既能保证中断函数的简短快速,又能保证不产生冲突的硬件操作}
}HAL库实现
已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32-hal
IDE配置
配置PB8 PB9(OLED屏幕)是输出,PB0 PB1(旋转编码器)是外部中断
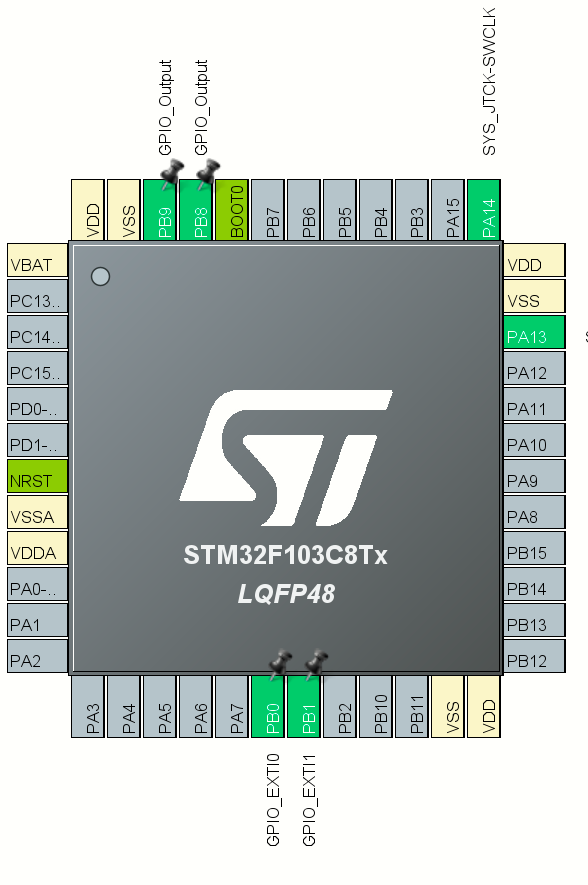
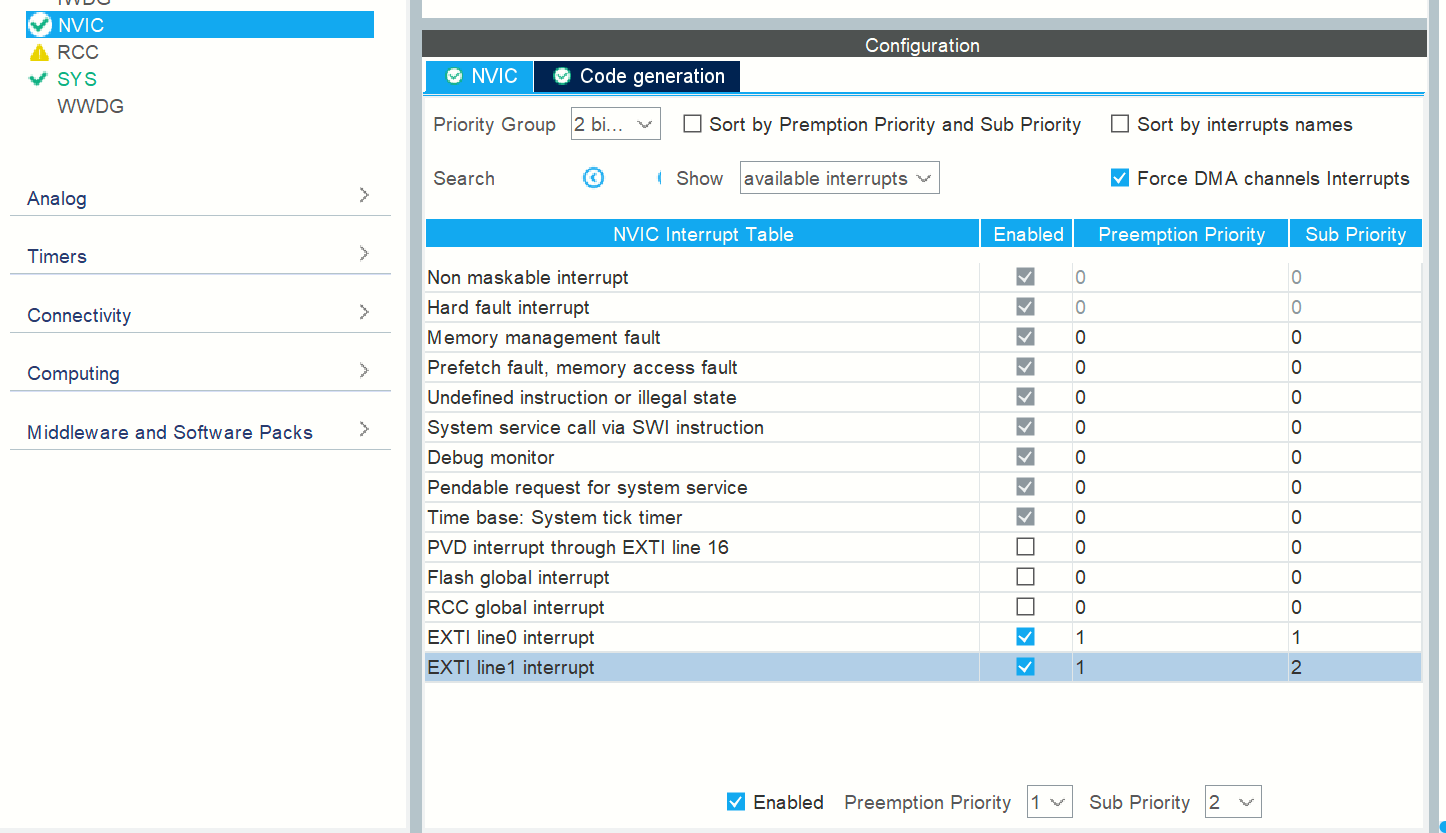
设置NVIC 外部中断1和0抢占式优先级都是1,响应优先级分别是1,2
设置外部中断1和0都是下降沿触发,设置PB8 PB9是默认高电平的开漏输出(I2C通信需要)
然后新建Hardware文件夹,把之前写的驱动的代码都拷贝过去,设置Hardware目录……不再赘述,详细看本系列之前的文章
然后设置编译后生成16进制文件……不再赘述,详细看本系列之前的文章
代码实现
Encoder.h
/** Encoder.h** Created on: Aug 11, 2025* Author: Administrator*/#ifndef HARDWARE_ENCODER_H_
#define HARDWARE_ENCODER_H_int16_t Encoder_Get(void); //获取计数器
void Encoder_PositiveRotation(void); //旋转编码器正转
void Encoder_Rollback(void); //旋转编码器反转#endif /* HARDWARE_ENCODER_H_ */Encoder.c
/** Encoder.c** Created on: Aug 11, 2025* Author: Administrator*/#include "stm32f1xx_hal.h"int16_t Encoder_Count; //旋转编码器计数变量//获取计数器
//清零,因为每次读取的是旋钮的旋转度
int16_t Encoder_Get(void)
{int16_t Temp = 0;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}//旋转编码器正转
void Encoder_PositiveRotation(void)
{Encoder_Count++;
}//旋转编码器反转
void Encoder_Rollback(void)
{Encoder_Count--;
}stm32f1xx_it.c.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file stm32f1xx_it.c* @brief Interrupt Service Routines.******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "Encoder.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD *//* USER CODE END TD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//* External variables --------------------------------------------------------*//* USER CODE BEGIN EV *//* USER CODE END EV *//******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/*** @brief This function handles Non maskable interrupt.*/
void NMI_Handler(void)
{/* USER CODE BEGIN NonMaskableInt_IRQn 0 *//* USER CODE END NonMaskableInt_IRQn 0 *//* USER CODE BEGIN NonMaskableInt_IRQn 1 */while (1){}/* USER CODE END NonMaskableInt_IRQn 1 */
}/*** @brief This function handles Hard fault interrupt.*/
void HardFault_Handler(void)
{/* USER CODE BEGIN HardFault_IRQn 0 *//* USER CODE END HardFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_HardFault_IRQn 0 *//* USER CODE END W1_HardFault_IRQn 0 */}
}/*** @brief This function handles Memory management fault.*/
void MemManage_Handler(void)
{/* USER CODE BEGIN MemoryManagement_IRQn 0 *//* USER CODE END MemoryManagement_IRQn 0 */while (1){/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 *//* USER CODE END W1_MemoryManagement_IRQn 0 */}
}/*** @brief This function handles Prefetch fault, memory access fault.*/
void BusFault_Handler(void)
{/* USER CODE BEGIN BusFault_IRQn 0 *//* USER CODE END BusFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_BusFault_IRQn 0 *//* USER CODE END W1_BusFault_IRQn 0 */}
}/*** @brief This function handles Undefined instruction or illegal state.*/
void UsageFault_Handler(void)
{/* USER CODE BEGIN UsageFault_IRQn 0 *//* USER CODE END UsageFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_UsageFault_IRQn 0 *//* USER CODE END W1_UsageFault_IRQn 0 */}
}/*** @brief This function handles System service call via SWI instruction.*/
void SVC_Handler(void)
{/* USER CODE BEGIN SVCall_IRQn 0 *//* USER CODE END SVCall_IRQn 0 *//* USER CODE BEGIN SVCall_IRQn 1 *//* USER CODE END SVCall_IRQn 1 */
}/*** @brief This function handles Debug monitor.*/
void DebugMon_Handler(void)
{/* USER CODE BEGIN DebugMonitor_IRQn 0 *//* USER CODE END DebugMonitor_IRQn 0 *//* USER CODE BEGIN DebugMonitor_IRQn 1 *//* USER CODE END DebugMonitor_IRQn 1 */
}/*** @brief This function handles Pendable request for system service.*/
void PendSV_Handler(void)
{/* USER CODE BEGIN PendSV_IRQn 0 *//* USER CODE END PendSV_IRQn 0 *//* USER CODE BEGIN PendSV_IRQn 1 *//* USER CODE END PendSV_IRQn 1 */
}/*** @brief This function handles System tick timer.*/
void SysTick_Handler(void)
{/* USER CODE BEGIN SysTick_IRQn 0 *//* USER CODE END SysTick_IRQn 0 */HAL_IncTick();/* USER CODE BEGIN SysTick_IRQn 1 *//* USER CODE END SysTick_IRQn 1 */
}/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************//*** @brief This function handles EXTI line0 interrupt.*/
void EXTI0_IRQHandler(void)
{/* USER CODE BEGIN EXTI0_IRQn 0 */if(__HAL_GPIO_EXTI_GET_FLAG(GPIO_PIN_0)){//判断另一个引脚的电平//PB0(A)下降沿(因为中断是下降沿触发),PB1(B)低电平//说明是反转if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET){Encoder_Rollback();}/* USER CODE END EXTI0_IRQn 0 */HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);/* USER CODE BEGIN EXTI0_IRQn 1 */}/* USER CODE END EXTI0_IRQn 1 */
}/*** @brief This function handles EXTI line1 interrupt.*/
void EXTI1_IRQHandler(void)
{/* USER CODE BEGIN EXTI1_IRQn 0 */if(__HAL_GPIO_EXTI_GET_FLAG(GPIO_PIN_1)){//PB0(A)低电平,PB1(B)下降沿//说明是正转if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET){Encoder_PositiveRotation();}/* USER CODE END EXTI1_IRQn 0 */HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);/* USER CODE BEGIN EXTI1_IRQn 1 */}/* USER CODE END EXTI1_IRQn 1 */
}/* USER CODE BEGIN 1 *//* USER CODE END 1 */main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "MYOLED.h"
#include "CountSensor.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();/* USER CODE BEGIN 2 */MYOLED_Init();MYOLED_ShowString(0, 0, "Count:");//MYOLED_ShowString(0, 0, "CountA:");/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){MYOLED_ShowNum(6, 0, CountSensor_Get(), 5);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}
}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* USER CODE BEGIN MX_GPIO_Init_1 *//* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOB_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_SET);/*Configure GPIO pin : PB14 */GPIO_InitStruct.Pin = GPIO_PIN_14;GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pins : PB8 PB9 */GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* EXTI interrupt init*/HAL_NVIC_SetPriority(EXTI15_10_IRQn, 1, 1);HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);/* USER CODE BEGIN MX_GPIO_Init_2 *//* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */效果展示
正方向:
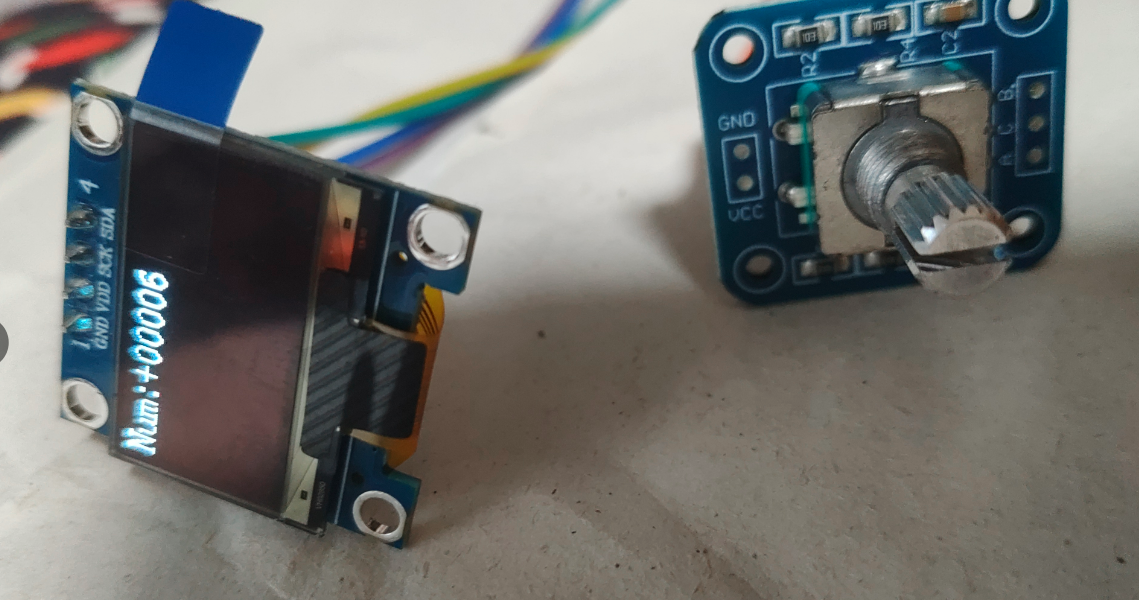
反方向:
